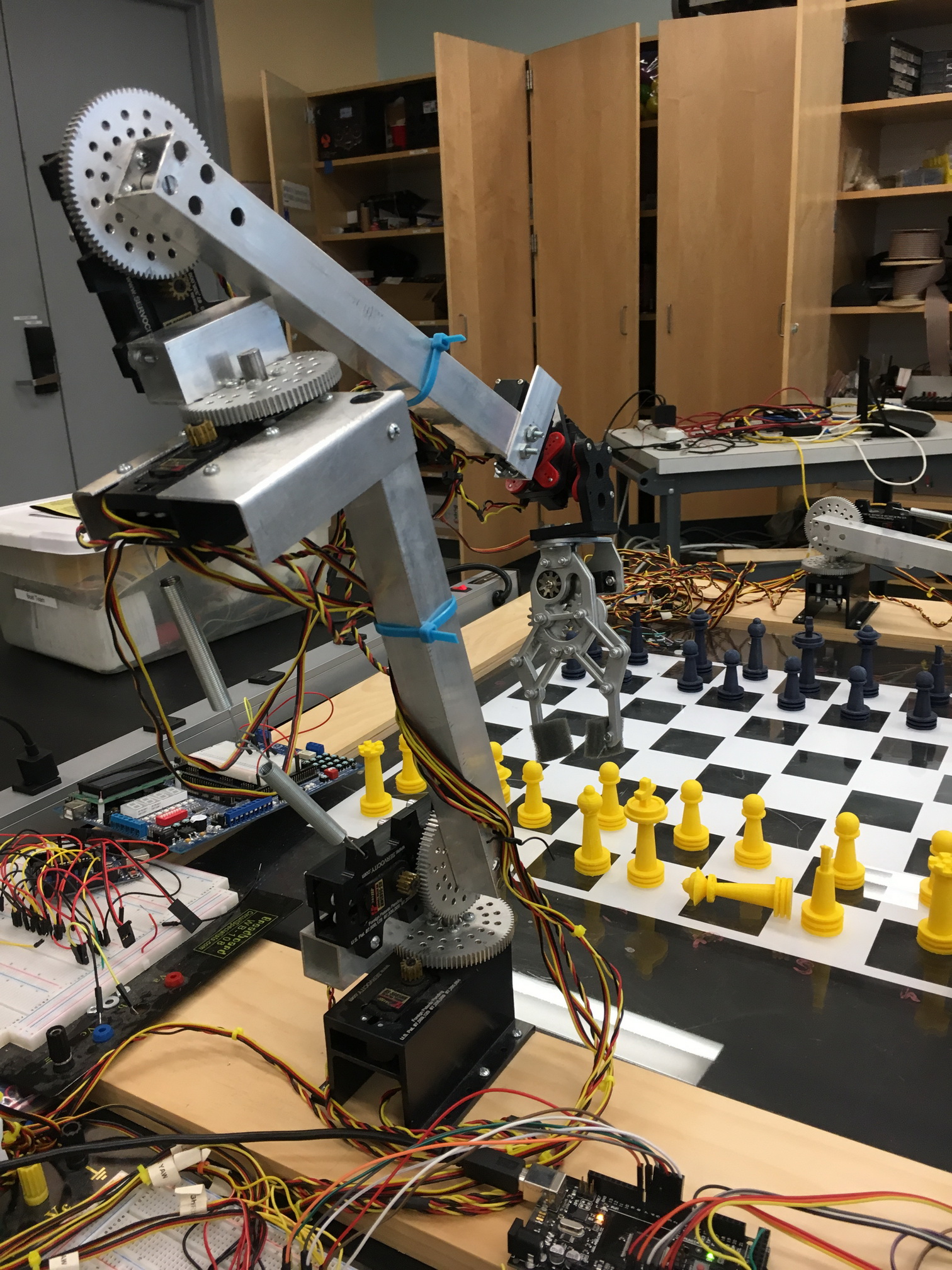
This Robot was better at chess than me
This project was started from a course "Hardware and software Integration" where we learned the use of C# and windows forms programs to communicate over a serial interface.
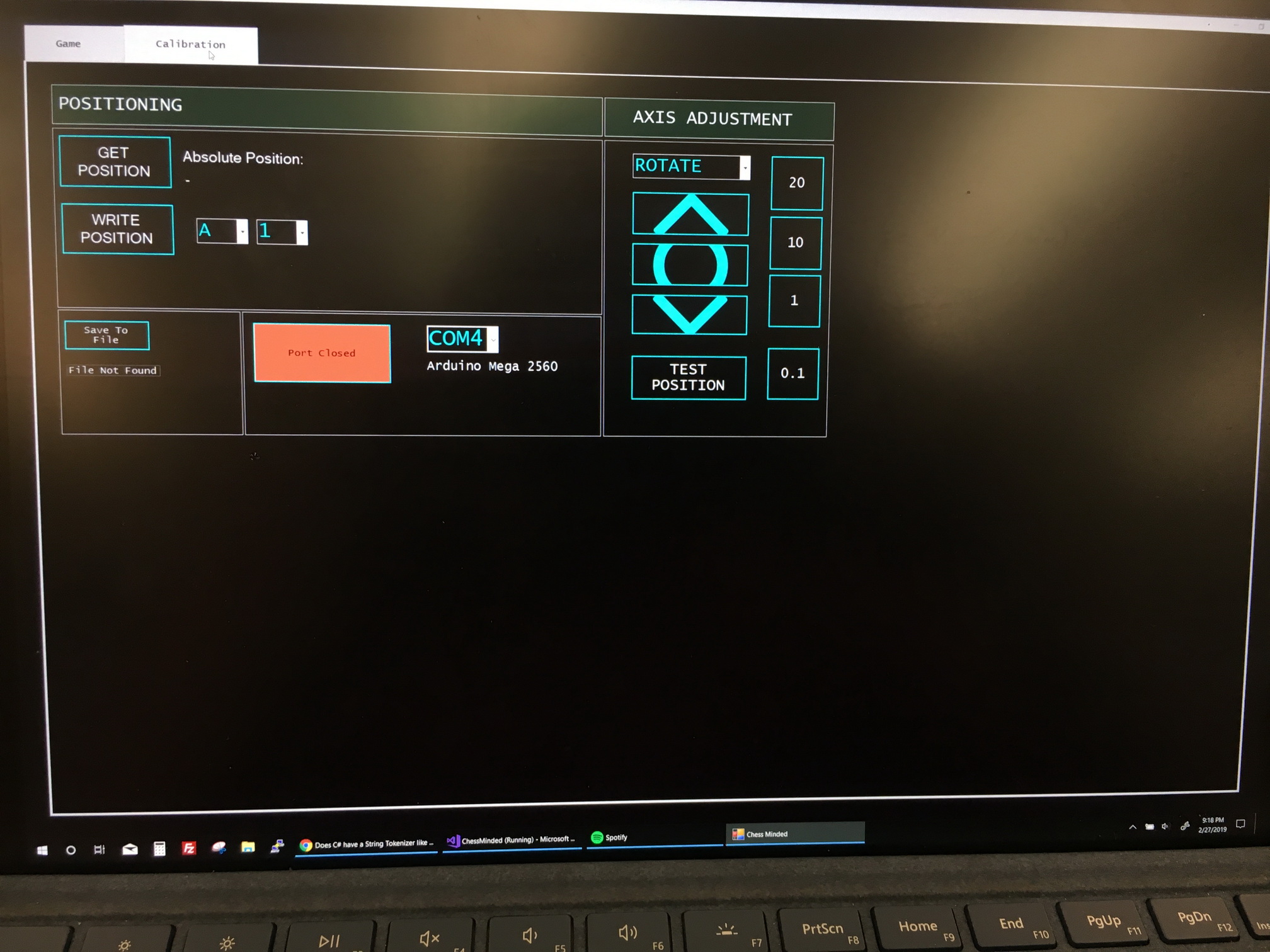
GUI had never been so easy. With Visual Studio I was able to drag and drop icons, buttons, and sliders with ease.
Programming the backend was easy as well.
I was given this project by the professor to "see if I could make it move by the end of the semester".
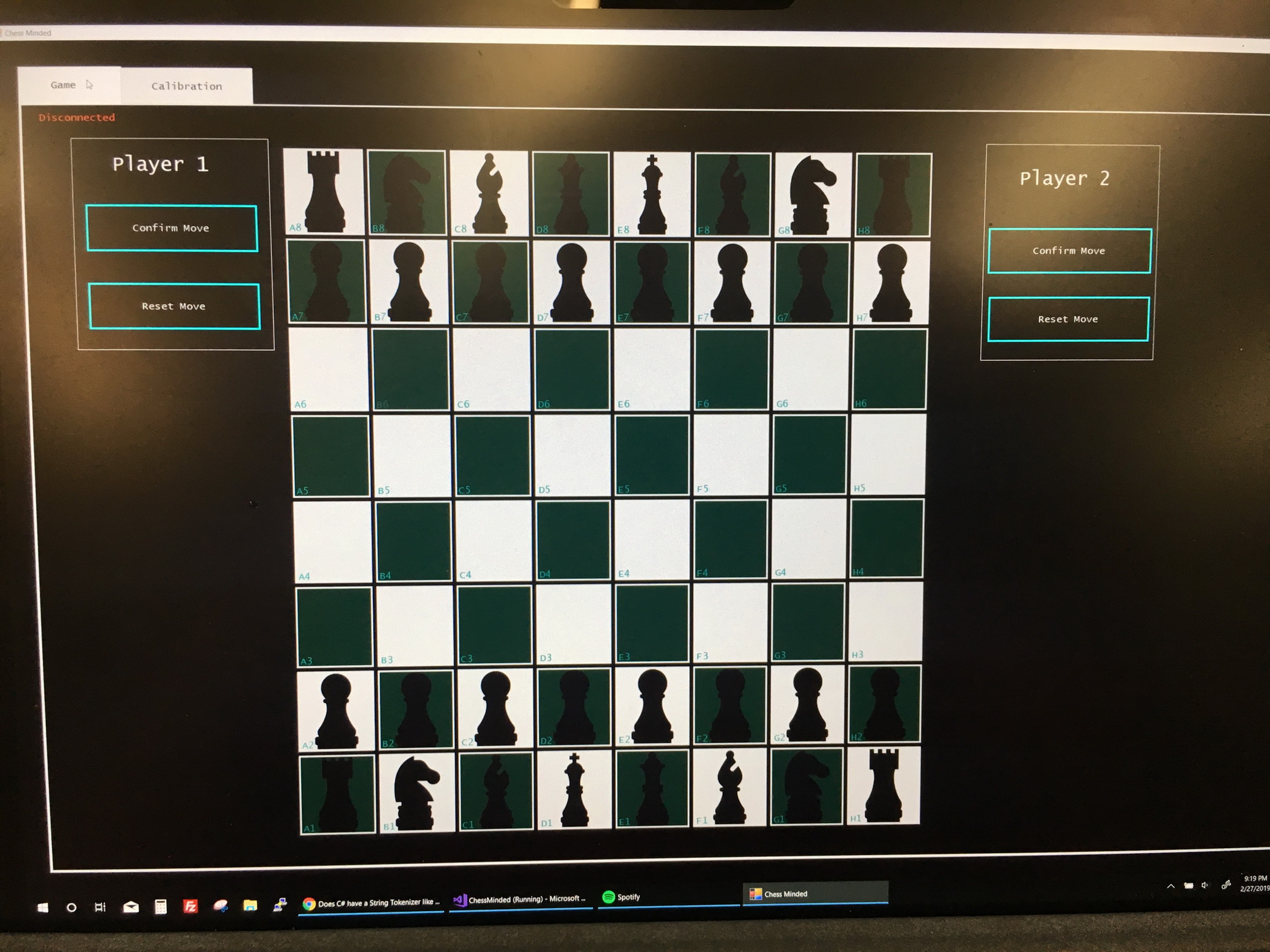
In two weeks I had a program interface where I could select the chess piece on the screen and select the position I would like to have it moved to.
This program did not include a chess engine. This was strictly hardware control.
The program included a calibration page to read the servo positions and write to a text document used for positioning.
To use the robot you would select a piece you wanted to move and then select the tile you wanted the robot to move the piece to.
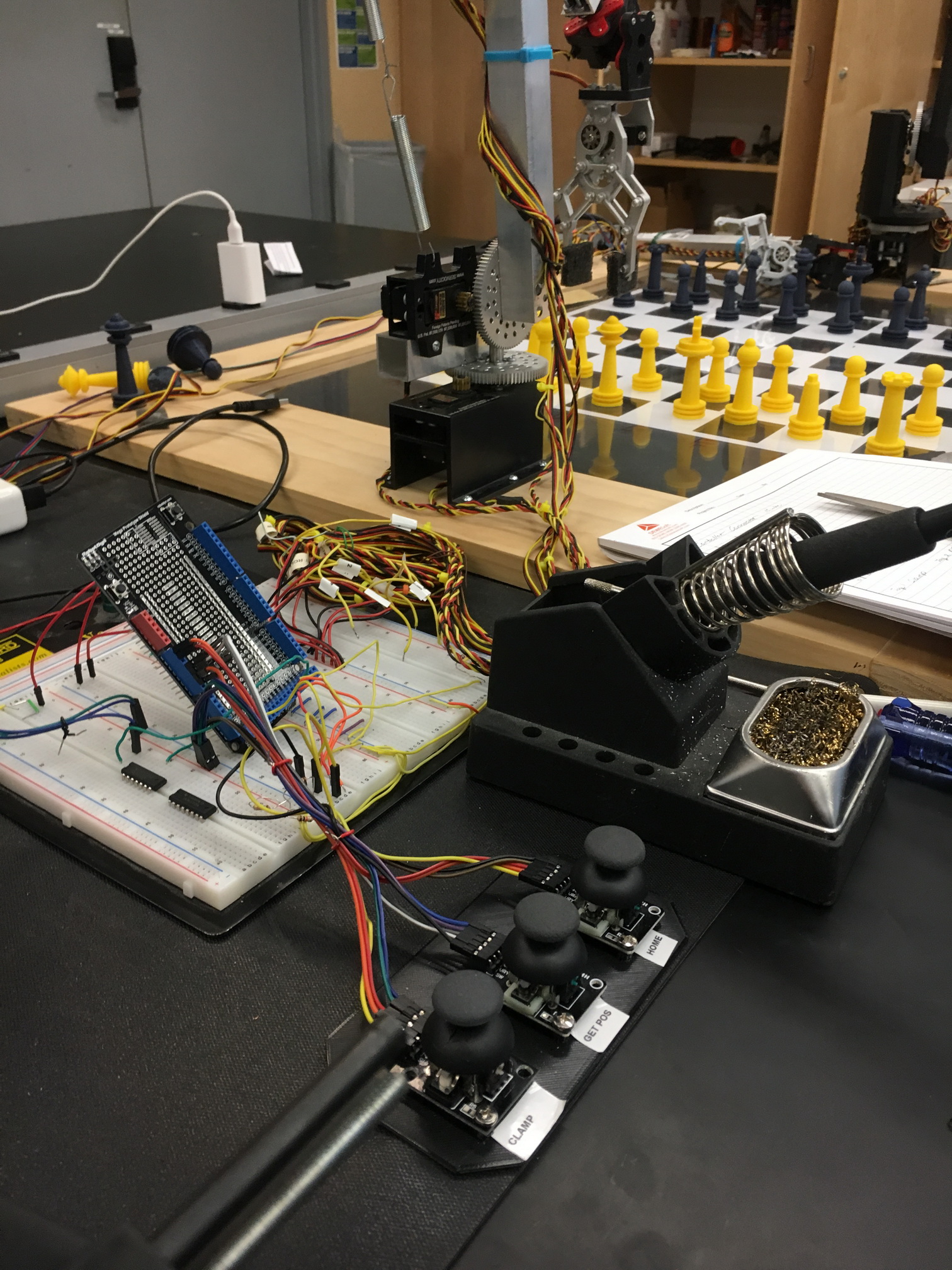
The robot could be manually controlled using 3 joysticks
The mechanical design was already completed by some other students. It was pretty jerky.